



Automatisoitu kolmiulotteinen varasto on tärkeä osa logistiikkaa. Sillä on monia etuja, kuten maan säästö, työvoimaintensiteetin vähentäminen, virheiden eliminointi, varastoautomaation ja -hallinnan tason parantaminen, johtamisen ja operaattoreiden laadun parantaminen, varastointi- ja kuljetushäviöiden vähentäminen, käyttöpääoman ruuhkan tehokas vähentäminen ja logistiikan parantaminen. tehokkuus, Samalla tehdastason tietokonehallinnan tietojärjestelmään yhdistetty ja tuotantolinjaan tiiviisti yhdistetty automaattinen kolmiulotteinen varasto on CIMS:n (Computer Integrated Manufacturing System) ja FMS:n (flexible production system) olennainen avainlinkki. Se on myös järjestelmä, joka varastoi ja nostaa logistiikan automaattisesti ilman suoraa manuaalista puuttumista. Se on modernin teollisen yhteiskunnan kehityksen korkean teknologian tuote, ja yrityksille on tärkeää parantaa tuottavuutta Kustannusten vähentämisellä on tärkeä rooli.
Viime vuosina yritysten tuotannon ja johtamisen jatkuvan parantamisen myötä yhä useammat yritykset ymmärtävät, että logistiikkajärjestelmän parantaminen ja järkeistäminen on erittäin tärkeää yritysten kehitykselle. Pinoaja on automatisoidun kolmiulotteisen varaston tärkein nosto- ja pinoamislaitteisto. Se voi kuljettaa tavaroita paikasta toiseen manuaalisella, puoliautomaattisella tai täysautomaattisella käytöllä. Se voi kulkea edestakaisin automatisoidulla kolmiulotteisella kaistalla ja varastoida tavarat kaistan sisäänkäynnissä tavaratilaan; Tai päinvastoin, ota tavarat ulos tavaratilassa ja kuljeta kaistan risteykseen, eli pinoaja on kisko- tai telaton vaunu, jossa on nostolaitteita. Pinoaja on varustettu moottorilla, joka käyttää pinoamislavaa siirtämään ja nostamaan lavaa. Kun pinoaja löytää tarvittavan tavaratilan, se voi automaattisesti työntää tai vetää osat tai tavaralaatikot telineeseen tai ulos siitä. Pinoajassa on anturi, joka tunnistaa vaakasuuntaisen liikkeen tai nostokorkeuden tavaratilan sijainnin ja korkeuden tunnistamiseksi, Joskus voit lukea myös kontin osien nimet ja muut asiaankuuluvat osatiedot.
Tietokoneohjaustekniikan ja automaattisen kolmiulotteisen varaston kehittymisen myötä pinoajan käyttö on entistä laajempaa, tekninen suorituskyky on parempi ja parempi ja myös korkeus kasvaa. Toistaiseksi pinoajan korkeus voi olla 40 metriä. Itse asiassa, jos varaston rakentaminen ja kustannukset eivät rajoita sitä, pinoajan korkeus voi olla rajoittamaton. Myös pinoajan käyttönopeus paranee jatkuvasti. Tällä hetkellä pinoajan vaakasuora käyttönopeus on jopa 200m/min (pienellä kuormalla pinoaja on saavuttanut 300m/min), nostonopeus on jopa 120m/min ja haarukan teleskooppinopeus jopa 50m /min
Pinoajan kokoonpano
Pinoaja koostuu rungosta (yläpalkki, alapalkki ja pylväs), vaakasuuntaisesta kulkumekanismista, nostomekanismista, lastialustasta, haarukista ja sähköisestä ohjausjärjestelmästä. Yksityiskohdat ovat seuraavat:
kehys
Runko on suorakaiteen muotoinen runko, joka koostuu yläpalkista, vasemmasta ja oikeasta pylväästä sekä alapalkista, jota käytetään pääasiassa laakerointiin. Osien asennuksen helpottamiseksi ja pinoajan painon vähentämiseksi ylä- ja alapalkit on valmistettu kanavateräksestä ja pilarit neliöteräksestä. Ylempi poikkipalkki on varustettu taivaskiskon pysäyttimellä ja puskurilla, ja alempi poikkipalkki on varustettu maakiskon pysäyttimellä.
Toimintamekanismi
Juoksumekanismi on pinoamiskoneen vaakasuuntaisen liikkeen käyttömekanismi, joka koostuu yleensä moottorista, kytkimestä, jarrusta, vähennyksestä ja ajopyörästä. Se voidaan jakaa maakäyttötyyppiin, ylempään juoksutyyppiin ja väliajotyyppiin juoksumekanismin eri asentojen mukaan. Kun maakulkutyyppi otetaan käyttöön, tarvitaan neljä pyörää kulkemaan pitkin maahan asetettua yksikiskoa. Pinoajan yläosaa ohjaavat kaksi vaakasuuntaista pyörää yläpalkkiin kiinnitettyä I-palkkia pitkin. Yläpalkki on yhdistetty pulteilla ja pylväillä ja alapalkki hitsataan kanavateräksellä ja teräslevyllä. Liikkuva käyttömekanismi, isäntä-orjamoottoripyörä, sähkökaappi jne. on asennettu kaikki siihen. Alapalkin molemmilla puolilla on myös puskurit, jotka estävät pinoajaa synnyttämästä suurta törmäysvoimaa tunnelin molemmissa päissä olevan hallitsemattomuuden vuoksi. Jos pinoamiskoneen on otettava kaarre, ohjauskiskoon voidaan tehdä joitain parannuksia.
Nostomekanismi
Nostomekanismi on mekanismi, joka saa kuormalavan liikkumaan pystysuunnassa. Se koostuu yleensä moottorista, jarrusta, alennusvaihteesta, rummista tai pyörästä ja joustavista osista. Yleisimmin käytettyjä joustavia osia ovat teräsvaijeri ja nostoketju. Yleisen vaihteiston lisäksi käytetään kierukkavaihteistoa ja planeettavähennystä, koska tarvitaan suuri nopeussuhde. Suurin osa nostoketjun voimansiirtolaitteista on asennettu yläosaan ja varustettu usein vastapainoilla nostovoiman vähentämiseksi. Nostomekanismin pienentämiseksi käytetään usein jarrullista moottoria. Ketju on liitetty kiinteästi lavaan pylvään hammaspyörän kautta. Pystysuora nostotukikomponentti on pilari. Pilari on laatikkorakenne, jossa on ensisijaisesti vääristymisen esto, ja ohjauskisko on asennettu pilarin molemmille puolille. Pylväs on myös varustettu ylä- ja alarajakytkimillä ja muilla komponenteilla.
Haarukka
Se koostuu pääasiassa moottorin alennusvaihteesta, ketjupyörästä, ketjun liitoslaitteesta, haarukkalevystä, liikkuvasta ohjauskiskosta, kiinteästä ohjauskiskosta, rullalaakerista ja joistakin asemointilaitteista. Haarukkamekanismi on toimeenpanomekanismi, jolla pinoaja pääsee käsiksi tavaroihin. Se on asennettu pinoamislavalle ja sitä voidaan laajentaa ja vetää vaakatasossa, jotta tavarat voidaan lähettää tai viedä ulos lastiristikon molemmille puolille. Yleensä haarukat jaetaan haarukoiden lukumäärän mukaan yksihaarukka-, kaksois- tai monihaarukkahaarukoihin, ja monihaarukkahaarukoita käytetään enimmäkseen erikoistavaroiden pinoamiseen. Haarukat ovat enimmäkseen kolmivaiheisia lineaarisia differentiaaliteleskooppihaarukoita, jotka koostuvat ylähaarukasta, keskihaarukasta, alahaarukasta ja neularullalaakerista, joissa on ohjaustoiminto, jotta ajoradan leveys pienenee ja sillä on riittävä teleskooppiliike. Haarukka voidaan jakaa kahteen tyyppiin rakenteensa mukaan: hammastankotilaan ja ketjukäyttöön. Haarukan teleskooppiperiaate on, että alahaarukka asennetaan lavalle, keskihaarukkaa ohjataan hammaspyörän tai hammastangon avulla siirtymään vasemmalle tai oikealle alahaarukan fokuksesta noin puolet omasta pituudestaan ja ylempi haarukka ulottuu vasemmalle tai oikealle keskihaarukan keskipisteestä hieman yli puolet sen omasta pituudesta. Ylähaarukkaa käyttää kaksi rullaketjua tai vaijeria. Ketjun tai vaijerin toinen pää on kiinnitetty alahaarukkaan tai lavaan ja toinen pää ylähaarukkaan.
Nostomekanismi ja lava
Nostomekanismi koostuu pääasiassa nostomoottorista (mukaan lukien alennuspyörästä), vetopyörästä, vetoketjusta, kaksoispyörästä, nostoketjusta ja välipyörästä. Nostoketju on kaksirivinen rullaketju, jonka varmuuskerroin on suurempi kuin 5. Se muodostaa suljetun rakenteen välipyörällä lavalla sekä ylä- ja alapalkeissa. Kun nostomoottori käyttää kaksoisketjupyörää pyörimään käyttöketjun läpi, nostoketju liikkuu ja ajaa siten nostotason (mukaan lukien haarukat ja tavarat) nousemaan ja laskemaan. Nostomoottoria ohjataan PLC-taajuusmuunnolla, jotta vältetään nostoketjun liiallinen jännitys noston ja pysäytyksen alussa. Lastialusta on pääosin valmistettu litteästä ja hitsatusta teräslevystä, jota käytetään pääasiassa haarukoiden ja joidenkin turvasuojalaitteiden asentamiseen. Lavan vakaan ylös- ja alasliikkeen varmistamiseksi lavan kummallekin puolelle on asennettu 4 ohjauspyörää ja 2 yläpyörää pilaria pitkin.
Sähkölaitteet ja ohjaus
Se sisältää pääasiassa sähkökäytön, signaalinsiirron ja pinoamisohjauksen. Pinoaja käyttää liukuvaa kosketuslinjaa virtalähteenä; Koska virtahäiriöt häiritsevät helposti virtalähteen liukuvan kosketuslinjan kantoaallon viestintää, tiedonvaihtoon tietokoneen ja muiden varastolaitteiden kanssa käytetään infrapunaviestintätilaa, jolla on hyvä häiriönesto. Pinoajan toimintaominaisuudet ovat, että se on sijoitettava ja osoitettava tarkasti, muuten se vie väärän tavaran, vahingoittaa tavaroita ja hyllyjä sekä vahingoittaa itse pinoajaa vakavissa tapauksissa. Pinoamislaitteen sijainninsäätö käyttää absoluuttisen osoitteen tunnistusmenetelmää, ja laseretäisyysmittaria käytetään pinoajan nykyisen sijainnin määrittämiseen mittaamalla etäisyys pinoamisesta tukipisteeseen ja vertaamalla PLC:hen tallennettuja tietoja etukäteen. Kustannukset ovat korkeat, mutta luotettavuus korkea.
Turvallinen suojalaite
Stacker on eräänlainen nostokone, jonka täytyy kulkea suurella nopeudella korkeissa ja kapeissa tunneleissa. Henkilöstön ja laitteiden turvallisuuden varmistamiseksi pinoaja on varustettava täydellisillä laitteisto- ja ohjelmistoturvasuojalaitteilla, ja sähköohjauksessa on suoritettava sarja lukitus- ja suojatoimenpiteitä. Tärkeimmät turvasuojalaitteet sisältävät terminaalin rajasuojauksen, lukitussuojauksen, positiivisen asennon havaitsemisen, lastialustan köyden katkeamissuojan, virrankatkaisusuojauksen jne.

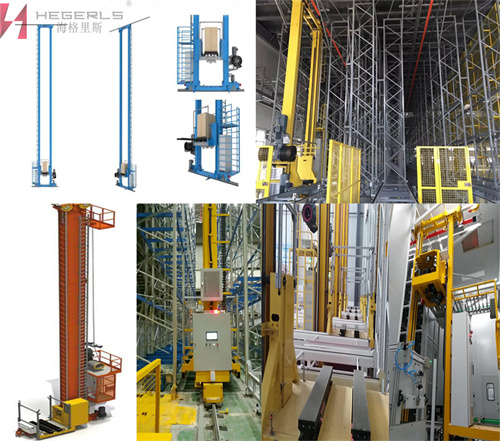
Pinoamiskoneen muodon määrittäminen: pinoamislaitteita on erilaisia, mukaan lukien yksikiskoinen pinoaja, kaksikiskoinen pinoaja, pyörivä tunnelipinoaja, yksipylväinen pinoaja, kaksipylväinen pinoaja jne.
Pinoamisnopeuden määritys: varaston virtausvaatimusten mukaan laske pinoajan vaakanopeus, nostonopeus ja haarukan nopeus.
Muut parametrit ja konfiguraatio: pinoajan paikannustila ja tiedonsiirtotila valitaan varaston työmaaolosuhteiden ja käyttäjän vaatimusten mukaan. Pinoajan kokoonpano voi olla korkea tai matala, riippuen tilanteesta.

Automaattisen kolmiulotteisen varaston pinoajan käyttö
* Kiinnitä huomiota pitämään käyttöpaneeli puhtaana ja puhdista pöly, öljy ja muut sekalaiset joka päivä.
*Koska kosketusnäyttö ja muut käyttöpaneelin sähkökomponentit vaurioituvat helposti kosteuden vaikutuksesta, pidä ne puhtaina.
*Käyttöpaneelia puhdistettaessa on suositeltavaa käyttää kosteaa liinaa ja varoa käyttämästä syövyttäviä puhdistusaineita, kuten öljytahroja.
*Kun siirretään AGV:tä, veto on ensin nostettava. Jos vetolaitteen nosto ei jostain syystä onnistu, AGV:n virta on katkaistava. Automaattivaunun siirtäminen on ehdottomasti kiellettyä, kun käyttö on päällä ja vetolaitetta ei ole nostettu.
*Kun automaattitrukki on pysäytettävä hätätilanteessa, on käytettävä hätäpainiketta. On kiellettyä käyttää vetoa tai muita häiriömenetelmiä AGV-vaunun pysäyttämiseen.
*On kiellettyä laittaa mitään käyttöpaneeliin.
Automaattisen kolmiulotteisen varaston pinoajan päivittäinen huolto
*Puhdista sekalaiset tavarat tai vieraat esineet pinoajassa ja tiellä.
*Tarkista, vuotaako öljyä vetolaitteen, nostimen ja haarukan asennoissa.
*Tarkista kaapelin pystysuora asento.
*Havaitse ohjauskiskon ja ohjauspyörän kuluminen pilarista.
*Puhdista pinoajaan asennetut elektroniset valosilmukat/anturit.
* Pinoajaan asennetun elektronisen optisen silmän/anturin toimintatesti.
*Tarkista ajo ja pyörien toiminta (kuluminen).
*Tarkista lisävarusteet ja tarkista, onko tukipyörä vaurioitunut.
*Tarkista, ettei pilariliitoksen ja pulttiliitoksen hitsauskohdassa ole halkeamia.
*Tarkista hammashihnan vaaka-asento.
*Tarkista pinoajan liikkuvuus.
*Tarkista pinoajan maalaustyöt silmämääräisesti.

Nykyaikaisen teollisuustuotannon kehittyessä kolmiulotteisessa varastossa pinoajan käyttö laajenee, ja sitä käytetään pääasiassa koneiden valmistuksessa, autoteollisuudessa, tekstiiliteollisuudessa, rautatie-, tupakka-, lääketieteen ja muilla aloilla, koska nämä teollisuudenalat ovat sopii paremmin automaattisen varaston käyttöön varastointia varten. Hagerls on kokonaisvaltainen yritys, joka keskittyy älykkään varastoinnin ja älykkään logistiikan automaatiolaitteiden ratkaisuun, suunnitteluun, valmistukseen ja asennuspalveluihin. Se voi tarjota asiakkaille yhden pylväspinoajan, kaksoispylväspinoajan, kääntyvän pinoajan, kaksinkertaisen pidennyspinoajan ja roskakorin pinoajan ja muun tyyppisiä laitteita. Se voi mukauttaa erilaisia pinoamislaitteita eri tuotteiden mukaan koosta ja painosta riippumatta.
Postitusaika: 18.8.2022